
Conteúdos acadêmicos para estudos e conhecimento em geral
16/12/2023
Sensor DTH22 com ESP32

CÓDIGO
#include <WiFi.h>
#include <Wire.h>
#include "DHTesp.h"
#include <Adafruit_Sensor.h>
#include <Adafruit_BME280.h>
#define DHT_PIN 4 // Pin onde o sensor DHT22 está conectado
float temperatura, umidade;
DHTesp dht;
Adafruit_BME280 bme;
const char* ssid = "USUARIO";
const char* password = "SENHA";
void setup() {
Serial.begin(115200);
delay(1000);
// Inicializa o sensor DHT22
dht.setup(DHT_PIN, DHTesp::DHT22);
//Inicializa o sensor BME280
//Código acima esta como comentario para fins de simulação
//Conecta-se à rede Wi-Fi
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(1000);
Serial.println("Conectando à rede WiFi...");
}
Serial.println("Conectado à rede WiFi");
}
void loop() {
// Leitura do sensor DHT22
temperatura = dht.getTemperature();
umidade = dht.getHumidity();
Serial.print("Temperatura: ");
Serial.print(temperatura);
Serial.println(" °C");
Serial.print("Umidade: ");
Serial.print(umidade);
Serial.println(" %");
delay(5000);
}
02/12/2023
Inserindo dados na tablela com PHP + ESP32 #10
 |
| Saída gerada no phpMyAdmin4 |
<?php
$hostname = "localhost";
$username = "root";
$password = "";
$database = "sensor_db";
$conn = mysqli_connect($hostname, $username, $password, $database);
if (!$conn) {
die("Connection failed: ".mysqli_connect_error());
}
echo "Database connection is OK";
echo ('<br>');
$sql = "INSERT INTO dht11 (temperature, humidity) VALUES (24, 45)";
if (mysqli_query($conn, $sql)) {
# code...
echo "\n";
echo "\nNovo registro criado com sucesso !";
}else {
echo "\nErro: ". $sql . "<br>" .mysqli_error($conn);
}
?>
Código em linguagem C para o ESP32:
//https://www.youtube.com/watch?v=VEN5kgjEuh8&ab_channel=AhmadLogs
#include <WiFi.h>
#include <HTTPClient.h>
String URL = "http://192.168.1.12/5 Esp32-Temperatura/test_data.php";
const char* ssid = "XXXX";
const char* password = "XXX";
int temperature = 50;
int humidity = 70;
void setup(){
Serial.begin(115200);
connectWiFi();
}
void connectWiFi(){
WiFi.mode(WIFI_OFF);
delay(1000);
WiFi.mode(WIFI_STA);
WiFi.begin(ssid, password);
Serial.println("Conectando no WiFi");
while(WiFi.status() != WL_CONNECTED){
delay(500);
Serial.print(".");
}
Serial.print("Conectado em: "); Serial.println(ssid);
Serial.print("IP address: "); Serial.println(WiFi.localIP());
delay(1000);
}
void loop(){
if(WiFi.status() != WL_CONNECTED){
connectWiFi();
}
String postData = "Temperatura = "+String(temperature)+"&humidity="+ String(humidity);
HTTPClient http;
http.begin(URL);
int httpCode = http.POST(postData);
String payload = http.getString();
http.addHeader("Content-Type", "application/x-www-form-urlencoded");
Serial.print("URL: ");Serial.print(URL);
Serial.print("Data: ");Serial.print(postData);
Serial.print("httpCode: ");Serial.print(httpCode);
Serial.print("payload: ");Serial.print(payload);
Serial.println("-------------------");
delay(4000);
}
26/11/2023
Fonte linear retificadora
Objetivo: Desenvolver 1 fonte retificadora de 5 V .

Dados:
Trafo = 24 V
Itrafo = 1 A
30% de Vcp
VCP:
Vp = Vs x √2 = 24 x √2
Vp = 33,94 V
Vcp = Vp - 2 x 0,7 = 33,94 - 2 x 0,2
Vcp = 32,54 V
CAPACITÂNCIA:
C = I / ( 2 x f x Vpp )
C = 1 / ( 2 x 60 (32,54 x 30% )
C = 853 uF = 900 uF
TENSÃO DE ISOLAÇÃO DO CAPACITOR:
Vcap = ( 32,54 x 50% ) + 32,43
Vcap = 48,81 V = 50 V
FUSÍVEL:
Psec = Vsec x Ic = 24 x 1
Psec = 24 W
Ipri = Vpri / Vpri = 24 / 127
Ipri = 378 mA
 |
| Saída gerada |
09/07/2023
LCD CGRAM com método avançado
Objetivo: Fazer uma animação no LCD cgram utilizando matriz para reduzir linhas de código.
 |
| LCD cgram com matriz |
Código feito em CCS C Compiler
#include <16F877A.h>
#use delay(clock = 20MHz)
#include <lcd.c>
#define LIN 12 // limite que a RAM consegue processar
#define COL 8
int matriz[LIN][COL] = {
{0b00000, 0b00000, 0b00000, 0b00000, 0b00000, 0b00000, 0b00000},
{0b00000, 0b01000, 0b00000, 0b00000, 0b00000, 0b00000, 0b00000},
{0b00000, 0b01110, 0b00000, 0b00000, 0b00000, 0b00000, 0b00000},
{0b00000, 0b01110, 0b00001, 0b00000, 0b00000, 0b00000, 0b00000},
{0b00000, 0b01110, 0b00001, 0b00001, 0b00001, 0b00000, 0b00000},
{0b00000, 0b01110, 0b00001, 0b00001, 0b00001, 0b00001, 0b00000},
{0b00000, 0b01110, 0b00001, 0b00001, 0b00001, 0b00001, 0b00010},
{0b00000, 0b01110, 0b00001, 0b00001, 0b00001, 0b00001, 0b01110},
{0b00000, 0b01110, 0b00001, 0b00001, 0b00001, 0b10001, 0b01110},
{0b00000, 0b01110, 0b00001, 0b00001, 0b10001, 0b10001, 0b01110},
{0b00000, 0b01110, 0b00001, 0b10001, 0b10001, 0b10001, 0b01110},
{0b00000, 0b01110, 0b10001, 0b10001, 0b10001, 0b10001, 0b01110}
};
void main(){
lcd_init();
while(TRUE){
/*
//matriz[0][i];
lcd_set_cgram_char(0, matriz[i]);
printf(lcd_putc, "\f%c \t\ni = %d", 0, i);
delay_ms(1000);
i++;
if(i >= LIN){ i = 0;}*/
for(int i = 0; i < COL; i++){
for(int j = 0; j < LIN; j++){
lcd_set_cgram_char(0, matriz[j]);
lcd_gotoxy(1, 1);
printf(lcd_putc, "\f%c \t[%d][%d]", 0, i, j);
delay_ms(500);
}
}
}
}
29/06/2023
CRUD com PHP
Objetivo: Fazer um CRUD em PHP
 |
| Saída do designer em PHP |
Arquivo 1: cadastrar_pessoa.php
<?php
// 6 funções
Class Pessoa{
private $pdo;
// CONEXÃO COM O BANCO DE DADOS
public function __construct($dbname, $host, $user, $senha) // tudo ok
{
try
{
$this->pdo = new PDO("mysql:dbname=".$dbname.";host=".$host,$user);
}
catch (PDOException $e) {//erro para o PDO
echo "Erro com o Banco de Dados: ".$e->getMessage();
exit();
}
catch(Exception $e){ // Erros genéricos
echo "Erro genérico: ".$e->getMessage();
exit();
}
}
//------- BUSCAR DADOS E EXIBIR NO LADO DIREITO DA TELA ----------
public function buscarDados() // tudo ok
{
$res = array();
$cmd = $this->pdo->query("SELECT * FROM pessoa ORDER BY id");
$res = $cmd->fetchAll(PDO::FETCH_ASSOC);// economiza memória
return $res;
}
// FUNÇÃO DE CADASTRAR PESSOAS NO BANCO DE DADOS
public function cadastrarPessoa($nome, $telefone, $email)
{
// Antes de cadastrar verificar se já tem o EMAIL cadastrado
$cmd = $this->pdo->prepare("SELECT id FROM pessoa WHERE email = :e");
$cmd->bindValue(":e", $email);
$cmd->execute();
if ($cmd->rowCount() > 0) //se > 0 email já existe no BD
{
return false;
}else // não foi encontrado no BD
{
$cmd = $this->pdo->prepare("INSERT INTO pessoa(nome, telefone, email)
VALUES (:n, :t, :e)");
$cmd->bindValue(":n", $nome);
$cmd->bindValue(":t", $telefone);
$cmd->bindValue(":e", $email);
$cmd->execute();
return true;
}
}
// MÉTODO PARA EXCLUIR PESSOA
public function excluirPessoa($id) // tudo ok
{
$cmd = $this->pdo->prepare("DELETE FROM pessoa WHERE id = :id");
$cmd->bindValue(":id", $id);
$cmd->execute();
}
// BUSCAR DADOS DE UMA PESSOA
public function buscarDadosPessoa($id) // tudo ok
{
$res = array();
$cmd = $this->pdo->prepare("SELECT * FROM pessoa WHERE id = :id");
$cmd->bindValue(":id", $id);
$cmd->execute();
$res = $cmd->fetch(PDO::FETCH_ASSOC);//economiza memória
return $res;
}
// ATUALIZAR DADOS NO BANCO DE DADOS
public function atualizarDados($id, $nome, $telefone, $email){ // tudo ok
$cmd = $this->pdo->prepare("UPDATE pessoa SET nome = :n, telefone = :t,
email = :e WHERE id = :id");
$cmd->bindValue(":n", $nome);
$cmd->bindValue(":t", $telefone);
$cmd->bindValue(":e", $email);
$cmd->bindValue(":id", $id);
$cmd->execute();
}
}
?>
Arquivo 2: index.php
<?php
require_once 'classe_pessoa.php';
$p = new Pessoa("crudpdo", "localhost", "root", "");
?>
<!DOCTYPE html>
<html lang="en">
<head>
<meta charset="UTF-8">
<meta name="viewport" content="width=device-width, initial-scale=1.0">
<title>Cadastro de Pessoa</title>
<link rel="stylesheet" href="estilo.css">
</head>
<body>
<?php
if (isset($_POST['nome']))
//CLICOU NO BOTÃO CADASTRAR OU EDITAR
{
if (isset($_GET['id_up']) && !empty($_GET['id_up']))
{
$id_upd = addslashes($_GET['id_up']);
$nome = addslashes($_POST['nome']);
$telefone = addslashes($_POST['telefone']);
$email = addslashes($_POST['email']);
if (!empty($nome) && !empty($telefone) && !empty($email))
{
$p->atualizarDados($id_upd, $nome, $telefone, $email);
header("location: index.php");
}
else
{
?>
<div class="aviso">
<img src="aviso.png" alt="">
<h4>Preencha todos os campos !</h4>
</div>
<?php
}
}
// ---------------------------- CADASTRAR ----------------------------
else
{
$nome = addslashes($_POST['nome']);
$telefone = addslashes($_POST['telefone']);
$email = addslashes($_POST['email']);
if(!empty($nome) && !empty($telefone) && !empty($email))
{
//cadastrar
if (!$p->cadastrarPessoa($nome, $telefone, $email))
{
?>
<div>
<img src="aviso.png" alt="">
<h4>Email já está cadastrado !</h4>
</div>
<?php
}
}
else
{
?>
<div class="aviso">
<img src="aviso.png" alt="">
<h4>Preencha todos os campos !</h4>
</div>
<?php
}
}
}
?>
<?php
if (isset($_GET['id_up'])) //SE A PESSOA CLICOU EM EDITAR
{
$id_update = addslashes($_GET['id_up']);
$res = $p->buscarDadosPessoa($id_update);
}
?>
<section id = "esquerda">
<form action="" method = "POST">
<h2>CADASTRAR PESSOA</h2>
<label for="nome">Nome</label>
<input type="text" name = "nome" id = "nome"
value="<?php if(isset($res)){echo $res['nome'];} ?>">
<label for="telefone">Telefone</label>
<input type="text" name="telefone" id="telefone"
value="<?php if(isset($res)){echo $res['telefone'];} ?>">
<label for="email">Email</label>
<input type="email" name="email" id="email"
value= "<?php if(isset($res)) {echo $res['email']; } ?>">
<input type="submit"
value= "<?php if (isset($res)) { echo "Atualizar"; }else { echo
"Cadastrar"; } ?>">
</form>
</section>
<section id="direita">
<table>
<tr id="titulo">
<td>NOME</td>
<td>TELEFONE</td>
<td colspan="2">EMAIL</td>
</tr>
<?php
$dados = $p->buscarDados();
if(count($dados) > 0)//TEM PESSOAS NO BANCO DE DADOS
{
for($i=0; $i < count($dados); $i++)
{
echo "<tr>";
foreach ($dados[$i] as $k => $v)
{
if($k != "id")
{
echo "<td>".$v."</td>";
}
}
?>
<td>
<?php echo $dados[$i]['id'] ?>
<a href="index.php?id_up=<?php echo $dados[$i]['id']; ?>">Editar</a>
<a href="index.php?id=<?php echo $dados[$i]['id']; ?>">Excluir</a>
</td>
<?php
echo "</tr>";
}
}
else // O BANCO DE DADOS ESTÁ VAZIO
{
?>
</table>
<div class="aviso">
<h4>Ainda não há pessoas cadastradas !</h4>
</div>
<?php
}
?>
</table>
</section>
</body>
</html>
<?php
if (isset($_GET['id'])) {
$id_pessoa = addslashes($_GET['id']);
$p->excluirPessoa($id_pessoa);
header("location: index.php");//atualiza a página após o clique
}
?>
Arquivo 3: estilo.css
*{
padding: 0px;
margin: 0px;
font-family: arial;
}
label, input{
display: block;
line-height: 30px;
height: 30px;
outline: none;
font-size: 13pt;
width: 100%;
}
form{
width: 330px;
background-color: rgba(0, 0, 0, 0.2);
padding: 20px;
margin: 30px auto; /*automático dos lados*/
}
input[type="submit"]{
margin-top: 10px;
cursor: pointer;
}
#esquerda{
width: 35% ;
height: 500px;
float: left;
}
h2{
text-align: center;
}
#direita{
margin-top: 30px;
width: 65%;
height: 500px;
float: left;
}
table {
background-color: rgba(0, 0, 0, 0.2);
width: 90%;
margin: auto;
}
tr{
line-height: 30px;
}
tr#titulo{
font-weight: bold;
background-color: rgba(0,0,0, .6);
color: white;
}
td{
padding: 0px 5px;
}
a{
background-color: white;
color: black;
padding: 5px;
margin: 0px 5px;
float: left;
}
.aviso {
width: 90%;
height: 50px;
margin: 30px auto 0px auto; /* margin no auto */
}
img {
width: 50px;
display: block;
float: left; /*flutuar à esquerda*/
}
h4{
float: left;
line-height: 50px;
}
Créditos para: Mirian TechCod
18/06/2023
Frequência em motor de passo com PIC 16F877A
Objetivo: Fazer um motor de passo com os seguintes requisitos :
1. O motor de passo deve girar no sentido horário ou anti-horário
2. Sua velocidade de rotação deve ser controlada por um potenciômetro
3. Deve ser acionada por 2 botões
4. Deve ser informada os dados no display LCD:
- Posição do ângulo
- Dados da frequência angular em que está girando
- Dados da frequência em Hz em que está girando
5. Se o motor estiver off, deverá ser acionado 1 Led e desligar os demais
6. Se o motor estiver ON no sentido horário deverá ser acionado o Led 2 e desligar os demais
7, Se o motor estiver ON no sentido anti-horário, deverá ser acionado o Led 3 e desligar os demais
8. Se o motor estiver off, deverá informar no Display LCD a quantidade de tempo e dias parado.
Resolução feita em CCS C Compiler e software Protheus
 |
| Circuito para identificar 1 ciclo de trabalho |
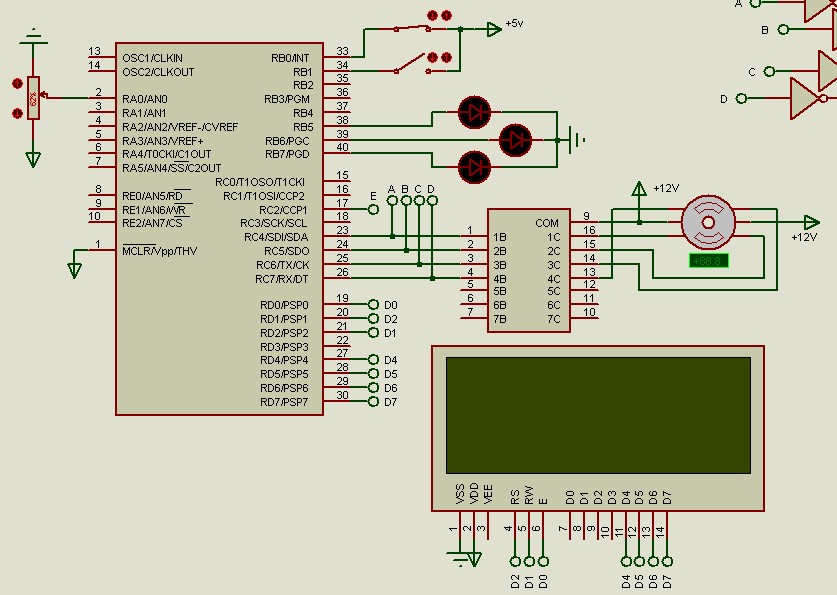 |
| Circuito |
 |
| Simulação feita no Protheus 7.9 |
CÓDIGO FEITO EM CCS C Compiler
#include <16F877A.h>
#device adc = 8
#use delay(clock = 20MHz)
#FUSES NOWDT, HS, NOPUT, NOPROTECT, NODEBUG, BROWNOUT, NOLVP, NOCPD, NOWRT, NOWRT
#include <lcd.c>
#define size 8
#define PIN_1 PIN_C4
#define PIN_2 PIN_C5
#define PIN_3 PIN_C6
#define PIN_4 PIN_C7
unsigned int A, B, i = 0, POSITION;
unsigned int16 VALUE;
unsigned int8 MOTOR[size] = {64, 96, 32, 48, 16, -112, -128, -64};
unsigned int16 posicao1[size] = {45, 90, 135, 180, 225, 270, 315, 360};
unsigned int16 posicao2[size] = {360, 315, 270, 225, 180, 135, 90, 45};
unsigned int DIAS, HORAS, MINUTOS, SEGUNDOS = 0;
char setaH[size] = {
0b00000,
0b00100,
0b00110,
0b11111,
0b00110,
0b00100,
0b00000,
0b00000
};
char setaA[size] = {
0b00000,
0b00100,
0b01100,
0b11111,
0b01100,
0b00100,
0b00000,
0b00000
};
char graus[size] = {
0b00110,
0b01001,
0b00110,
0b00000,
0b00000,
0b00000,
0b00000,
0b00000
};
int1 nuevopulso = 0, cambio = 0;
int16 TFB = 0, TFS = 0, TF = 0;
float TEMPO = 0.0, frequencia;
#int_ccp1
void ccp1_int(){
if(cambio == 0){
TFS = CCP_1;
setup_ccp1(CCP_CAPTURE_RE);
cambio = 1;
}else{
TFB = CCP_1;
setup_ccp1(CCP_CAPTURE_RE);
cambio = 0;
if(nuevopulso == 0){
nuevopulso = 1;
}
}
}
#INT_TIMER0
void TIMER0_isr(void) {
if (nuevopulso >= 1){
TF = (TFB - TFS);
TEMPO = TF * 1.0 / 1000.0;
frequencia = 1.0 / (TEMPO / 1000.0);
nuevopulso = 0;
}
}
#INT_TIMER1
void TIMER1_isr(void) {
A = input(PIN_B0);
B = input(PIN_B1);
}
void main(){
setup_adc_ports(AN0);
setup_adc(ADC_CLOCK_DIV_2);
setup_timer_0(T1_DIV_BY_1);
setup_timer_1(T1_INTERNAL|T1_DIV_BY_1); //13,1 ms overflow
setup_ccp1(CCP_CAPTURE_RE);
enable_interrupts(int_ccp1);
enable_interrupts(INT_TIMER1);
enable_interrupts(INT_TIMER0);
enable_interrupts(GLOBAL);
lcd_init();
lcd_set_cgram_char(4, graus);
while(TRUE) {
output_high(PIN_B5);
output_low(PIN_B6);
output_low(PIN_B7);
SEGUNDOS++;
if ( SEGUNDOS > 59 ){SEGUNDOS = 0 ; MINUTOS++ ;}
if ( MINUTOS > 59 ){MINUTOS = 0 ; HORAS++ ; }
if ( HORAS > 23 ) {HORAS = 0 ; DIAS++ ; }
lcd_gotoxy(1, 1);
printf(lcd_putc,"\f\t\t\tMOTOR OFF !");
lcd_gotoxy(1, 2);
printf(lcd_putc, "%02u:%02u:%02u",HORAS, MINUTOS, SEGUNDOS);
lcd_gotoxy(21, 1);
printf(lcd_putc, "DIAS PARADO: %u",DIAS);
delay_ms(1000);
while(A == 1 && B == 0){
output_high(PIN_B6);
output_low(PIN_B7);
output_low(PIN_B5);
VALUE = read_adc();
lcd_set_cgram_char(2, setaH);
lcd_gotoxy(1, 1);
printf(lcd_putc, "\f\t\tMOTOR ON ! \t%c", 2);
lcd_gotoxy(1, 2);
printf(lcd_putc,"ANGULO = [%lu%c]" posicao1[i], 4);
lcd_gotoxy(21, 1);
printf(lcd_putc,"W = %.2f rad/s", frequencia * 2 * 3.1415);
lcd_gotoxy(21, 2);
printf(lcd_putc, "F = %.2f Hz", frequencia);
POSITION = MOTOR[i];
output_bit(PIN_1, POSITION & 16);
output_bit(PIN_2, POSITION & 32);
output_bit(PIN_3, POSITION & 64);
output_bit(PIN_4, POSITION & 128);
i = (i + 1) % (sizeof(MOTOR) / sizeof(int));
delay_ms(VALUE);
}
while(A == 0 && B == 1){
output_high(PIN_B7);
output_low(PIN_B6);
output_low(PIN_B5);
VALUE = read_adc();
lcd_set_cgram_char(3, setaA);
lcd_gotoxy(1, 1);
printf(lcd_putc, "\f%c\tMOTOR ON !", 3);
lcd_gotoxy(1, 2);
printf(lcd_putc,"ANGULO = [-%lu%c]" posicao2[i], 4);
lcd_gotoxy(21, 1);
printf(lcd_putc,"W = %.2f rad/s", frequencia * 2 * 3.1415);
lcd_gotoxy(21, 2);
printf(lcd_putc, "F = %.2f Hz", frequencia);
POSITION = MOTOR[i];
output_bit(PIN_4, POSITION & 128);
output_bit(PIN_3, POSITION & 64);
output_bit(PIN_2, POSITION & 32);
output_bit(PIN_1, POSITION & 16);
i = (i - 1) % (sizeof(MOTOR) / sizeof(int));
delay_ms(VALUE);
}
}
}
11/06/2023
Inserir linhas no Google Sheets com JavaScript
Objetivo : Inserir uma quantidade X de linhas por comando da Planilha_1 para a Planilha_2 de outra URL da web com JavaScript.
Código feito no Google Sheets
function myFunction() {
var url2 = "Insira sua url aqui !";
var QtdlinhasDesejada = 2;
var spreadsheet = SpreadsheetApp.openByUrl(url2);
//spreadsheet.getRange('1:1').activate();
spreadsheet.getActiveSheet().insertRowsBefore(spreadsheet.getActiveRange().getRow(),
QtdlinhasDesejada );
//spreadsheet.getActiveRange().offset(0, 0, 1,
spreadsheet.getActiveRange().getNumColumns()).activate();//0 ,0, 1
//spreadsheet.getRange('C9').activate();
};
 |
| Execução e saída gerada |
09/06/2023
Mini teste 1 2022/2
1. Projete o circuito e o programa (compilador CCS) de um sistema baseado no microcontrolador PIC16F877A que faça a leitura da entrada analógica PIN_A0, via conversor AD configurado em 8 bits. O sistema deve apresentar 7 níveis de alerta através de um dispositivo de 3 segmentos (figura 1).

RESOLUÇÃO FEITA EM CCS C Compiler:

#include <16F877A.h>
#device adc = 8
#use delay(clock = 20M)
#fuses XT, NOWDT, NOPROTECT, NOBROWNOUT, NOLVP, NOCPD, NOWRT, NODEBUG
#include <lcd.c>
unsigned int8 analog ;
#INT_TIMER0
void TIMER0_isr(void){
if (analog >= 127 && analog < 142){ // N1
output_low(PIN_B5);
output_low(PIN_B6);
output_toggle(PIN_B7);
}
if (analog >= 175 && analog < 191) { // N4
output_toggle(PIN_B5);
output_low(PIN_B6);
output_low(PIN_B7);
}
if (analog >= 159 && analog < 175) { // N3
output_low(PIN_B5);
output_toggle(PIN_B6);
output_toggle(PIN_B7);
}
if (analog >= 191 && analog < 207) { // N5
output_toggle(PIN_B5);
output_low(PIN_B6);
output_toggle(PIN_B7);
}
if (analog >= 143 && analog < 159) { // N2
output_low(PIN_B5);
output_toggle(PIN_B6);
output_low(PIN_B7);
}
if (analog >= 207 && analog < 223) { // N6
output_toggle(PIN_B5);
output_toggle(PIN_B6);
output_low(PIN_B7);
}
if (analog >= 223 && analog < 239) { // N7
output_toggle(PIN_B5);
output_toggle(PIN_B6);
output_toggle(PIN_B7);
}
}
void main(){
// Configuração do LCD
lcd_init();
// Configuração do ADC
setup_adc_ports(AN0);
setup_adc(ADC_CLOCK_DIV_8);
set_adc_channel(0);
setup_psp(PSP_DISABLED);
setup_spi(SPI_SS_DISABLED);
setup_timer_0(RTCC_INTERNAL | RTCC_DIV_2); // overflow 51,2 u
setup_comparator(NC_NC_NC_NC);
setup_vref(FALSE);
enable_interrupts(INT_TIMER0);
enable_interrupts(GLOBAL);
while (1){
analog = read_adc();
printf(lcd_putc, "\fLeitura: %u", analog);
delay_ms(1000);
}
}
 |
| Saída gerada |
2. Faça o circuito e o programa (compilador CCS) que liga um LED 1 e desliga o LED 2 quando um botão (Bot1) estiver apertado e desligar LED1 e liga o LED 2 se o botão (Bot1) estiver solvo. Os LED 3, 4 e 5 devem ficar piscando com frequências de 1.3, 2 e 3.5 vezes n Hz. Onde n é igual a soma do último e penúltimo número da sua matrícula.

RESOLUÇÃO FEITA EM CCS C Compiler :
#include <16F877A.h>
#use delay(clock = 20MHz)
// Configuração do microcontrolador
#fuses XT, NOWDT, NOPROTECT, NOBROWNOUT, NOLVP, NOCPD, NOWRT, NODEBUG
#include <lcd.c>
// Variáveis globais
int flag1 = 0, flag2 = 0;
unsigned int16 cont1 = 0, cont2 = 0, cont3 = 0;
#int_TIMER0
void TIMER0_isr(){
if(flag1 == 0 && flag2 == 1 && ++cont1 >= 85){
cont1 = 0; output_toggle(PIN_B5); // 114 Hz
}
if(flag1 == 0 && flag2 == 1 && ++cont2 >= 55){
cont2 = 0; output_toggle(PIN_B6); // 176 HZ
}
if(flag1 == 0 && flag2 == 1 && ++cont3 >= 32){
cont3 = 0; output_toggle(PIN_B7); // 308 Hz
}
}
// Função de tratamento da interrupção do TIMER1
#int_timer1
void timer1InterruptHandler(){
if (input(PIN_B0) == 1){
flag1 = 1;
flag2 = 0;
output_high(PIN_B3);
output_low(PIN_B4);
}
if(input(PIN_B1) == 1){
flag1 = 0;
flag2 = 1;
output_low(PIN_B3);
output_high(PIN_B4);
}
// Limpa a flag de interrupção do TIMER1
clear_interrupt(INT_TIMER1);
}
void main(){
// Configuração do TIMER1
setup_timer_1(T1_INTERNAL | T1_DIV_BY_1);
// Configuração das interrupções
enable_interrupts(INT_TIMER1); // Habilita a interrupção do TIMER1
enable_interrupts(GLOBAL); // Habilita todas as interrupções globais
setup_timer_0(RTCC_INTERNAL | RTCC_DIV_1); // overflow 51,2 us
setup_comparator(NC_NC_NC_NC);
setup_vref(FALSE);
enable_interrupts(INT_TIMER0);
lcd_init();
while (1){
printf(lcd_putc,"\f%d : %d",flag1, flag2);
delay_ms(50);
}
}
 |
| Saída gerada |
Assinar:
Postagens (Atom)