2° avaliação de Sinais - Nota = 85%
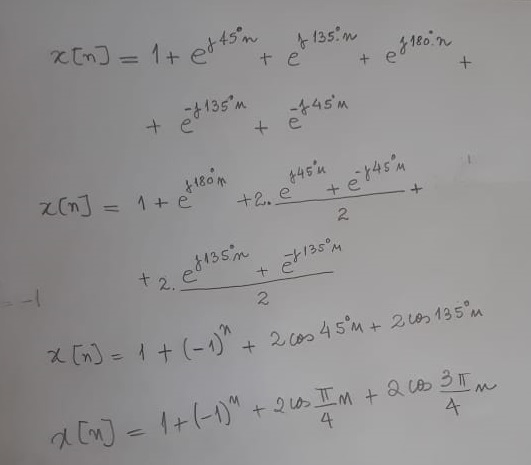
1) Obtenha os coeficientes da série de Fourier em tempo discreto para o sinal x[n] dado abaixo. Desenvolver o problema passo a passo.

Resolução:


2) Para os sinais dados abaixo, obtenha a transformada de Fourrier de tempo discreto diretamente utilizando a definição. Assuma |y|<1.

Resolução:

3) Considere um sistema LIT descrito pela equação de diferenças abaixo:
y[n]+ 7y[n -1] + 12y[n - 2] = x[n] + 2x[n - 1], determine:

4) Assinale com V(verdadeiro) ou com F(falso) as seguintes afirmações:

A sequência correta das afirmações dadas de cima para baixo, é:
a) ( ) V, V, V, F, F, V
b) ( ) V, F, F, V, F, F
c) ( ) F, F, V, F, F, V
d) ( ) F, F, F, V, F, V
e) ( ) F, V, V, F, F, V
Resolução:
Resposta letra:






")
")
")
")
")
")